MECHATRAXのブログ
本ブログでは、Raspberry Pi および関連モジュールを用いた
業務・産業用途での開発・運用に関する技術情報を発信しています。
4GPi(ラズベリーパイ用4G通信モジュール)の使用GPIO変更
4GPi(ラズベリーパイ用4G通信モジュール)の使用GPIO変更
【2025年10月追記】
本ブログは、2025年10月に下記環境にて動作確認済みです。
4gpi-bookworm-lite-arm64-20250515.md
4GPi は、ラズベリーパイ用4G(LTE)通信モジュールで、ラズベリーパイから GPIO を通じて電源制御などの指示を受けます。
通常、標準の GPIO 設定で問題なく動作しますが、他のデバイスと併用する際には GPIO が競合する可能性があります。例えば、4GPi では GPIO17 を通信モジュール電源制御に使用している為、他のデバイスでも GPIO17 を使用する場合、意図しないタイミングで 4GPi の電源がオン・オフされることがあります。
こうしたトラブルを防ぐためには、GPIO の設定が重要です。
本記事では、その具体的な設定方法を紹介します。
GPIO を使用する機能一覧
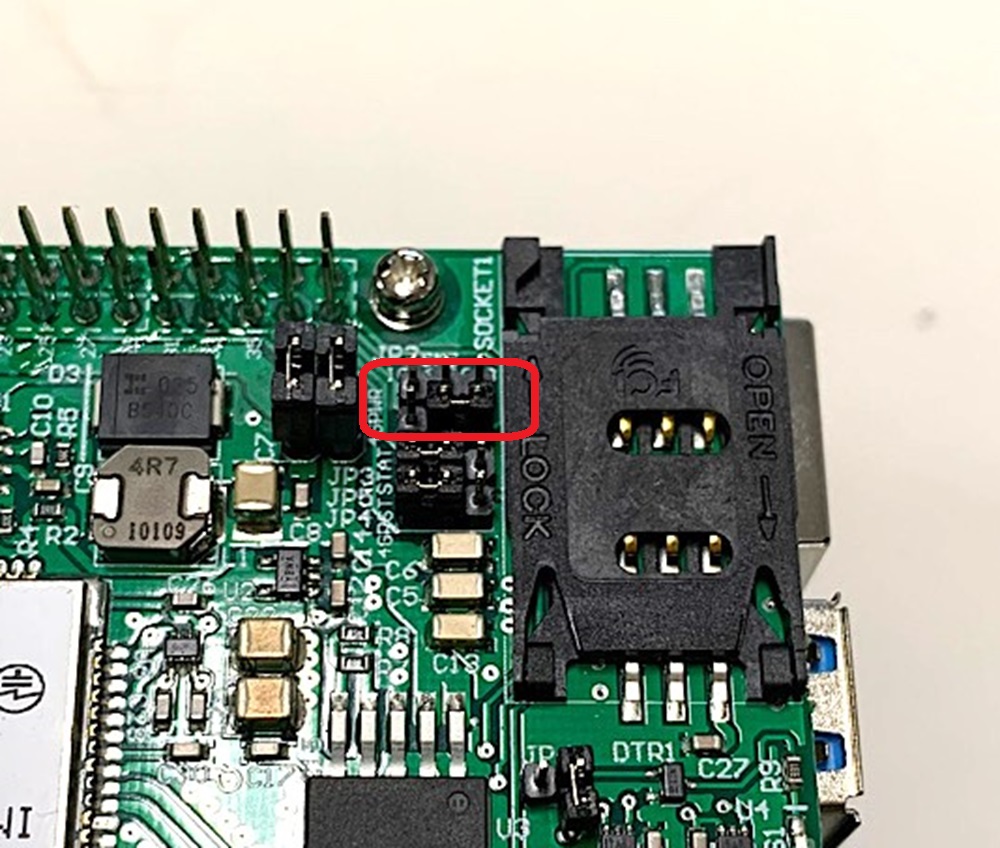
下図の紫枠内が各ピンに割り当てられた機能と使用可能な GPIO です。
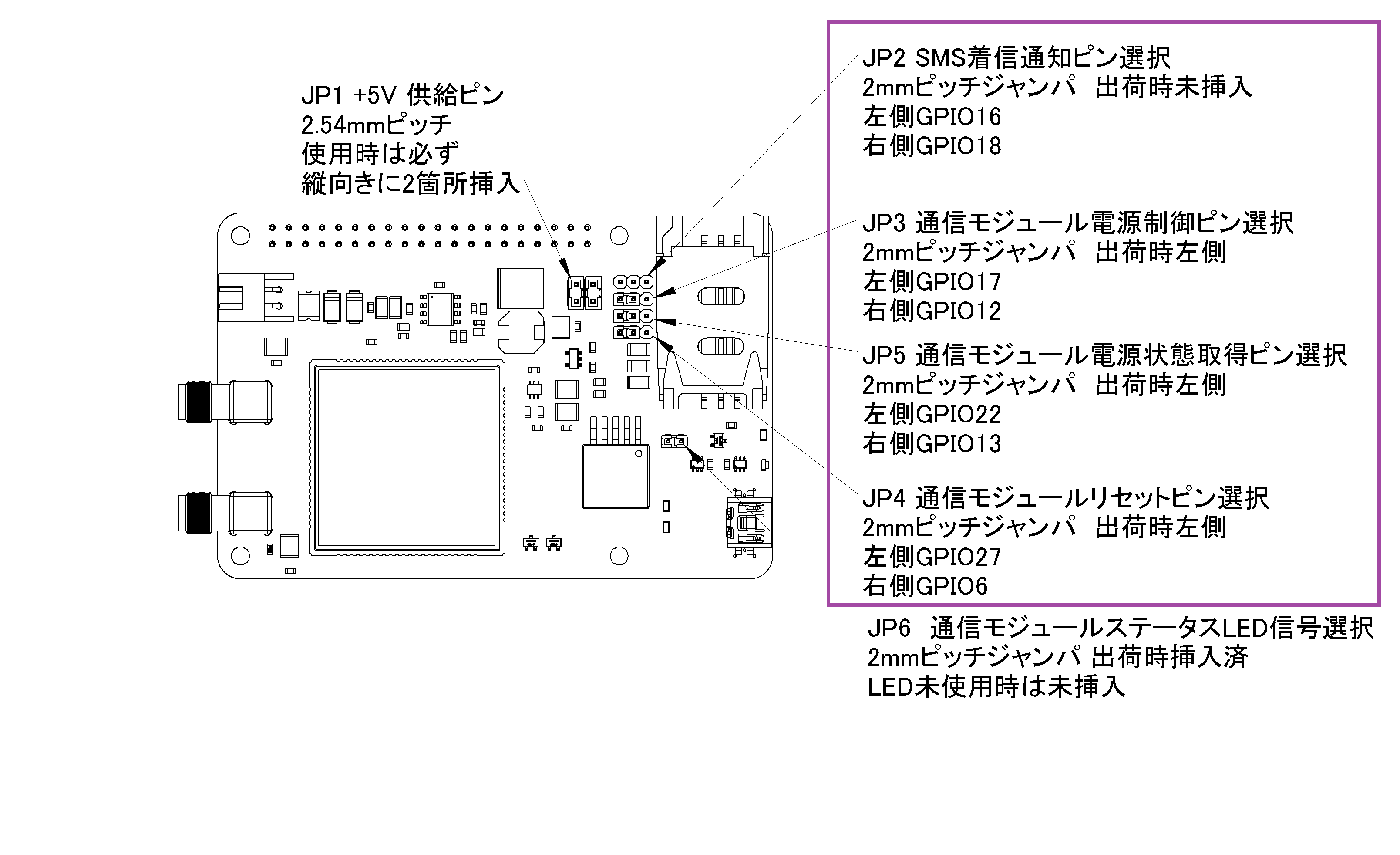
下表にまとめました。
| 基板シルク | 機能 | 使用可能な GPIO |
| JP2 | SMS着信通知 | 16または18(出荷時未接続) |
| JP3 | 通信モジュール電源制御 | 17または12(出荷時17使用) |
| JP5 | 通信モジュール電源状態取得 | 22または13(出荷時22使用) |
| JP4 | 通信モジュールリセット | 27または6(出荷時27使用) |
今回は、「JP3 通信モジュール電源制御」を例に設定方法を紹介します。
なお、他の機能の GPIO 設定変更についても、同様の設定方法となります。
設定手順1ー設定ファイルの変更
A)ラズベリーパイにログインし、エディタで 4GPi の設定ファイル(/etc/default/4gpi)を開きます。
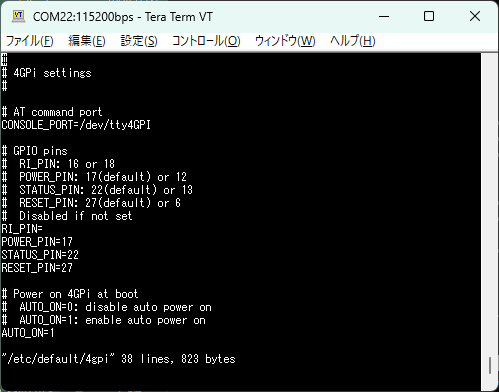
B)ファイル内は下図のような記述となっています。
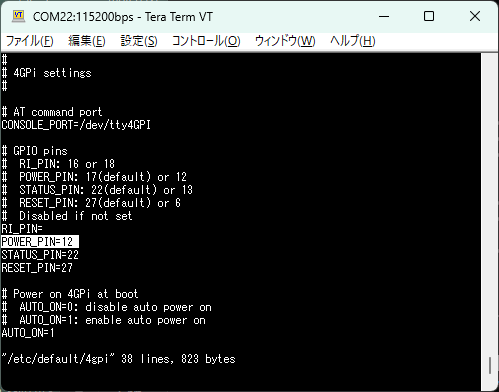
C)POWER_PIN=17 の部分を POWER_PIN=12 に書き換えます。
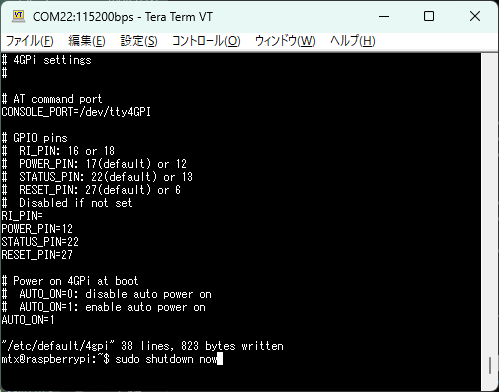
D)変更を保存して、ラズベリーパイをシャットダウンします。
設定手順2ー基板上ジャンパの変更
基板上の JP3 に付属しているジャンパを右側へ付け替えます。
※ 3つのピンのうち、右側2つのピンが短絡するようにジャンパをつけてください。
動作確認
起動後、4GPi の通信モジュールが電源オンになっているかどうか次のコマンドで確認します。
4gpictl status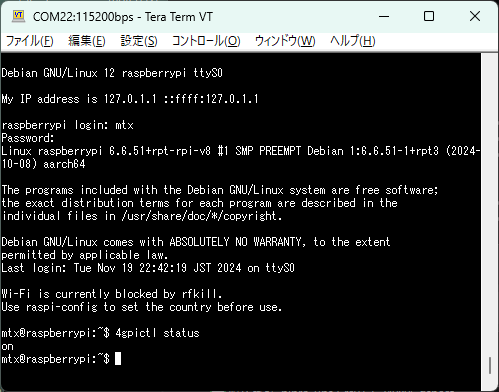
「on」が返ってくる場合、通信モジュールが正常に電源オンとなっており、設定は問題ありません。
「off」が返ってくる場合、通信モジュールが電源オフ状態です。
設定に問題があるため、設定手順1と2を再確認してください。
おわりに
以上、GPIO 設定方法の紹介でした。
4GPi で使用する GPIO を切り替えるには、基板上のジャンパピンと設定ファイルの両方を変更する必要があります。
どちらの設定も忘れず行うよう、ご注意ください。
参考情報
記事で紹介した内容に関する参考情報をまとめました。
必要に応じてご参照ください。
関連製品はこちら